● Разработаны алгоритмы для предупреждения выхода из полосы движения и виртуального коридора на основе нейросетей
● Разработаны алгоритмы для предупреждения выхода из полосы движения и виртуального коридора на основе нейросетей
● Разработаны алгоритмы для предупреждения выхода из полосы движения и виртуального коридора на основе нейросетей
● Алгоритмы имплементированы и протестированы на конечном блоке управления транспортного средства

● Прототипирован робот для теплиц
● Прототипирован робот для теплиц
● Прототипирован робот для теплиц
● Разработаные и протестированы системы компьютерного зрения для распознавания заболеваний и оценки урожайности с точностью свыше 90 %

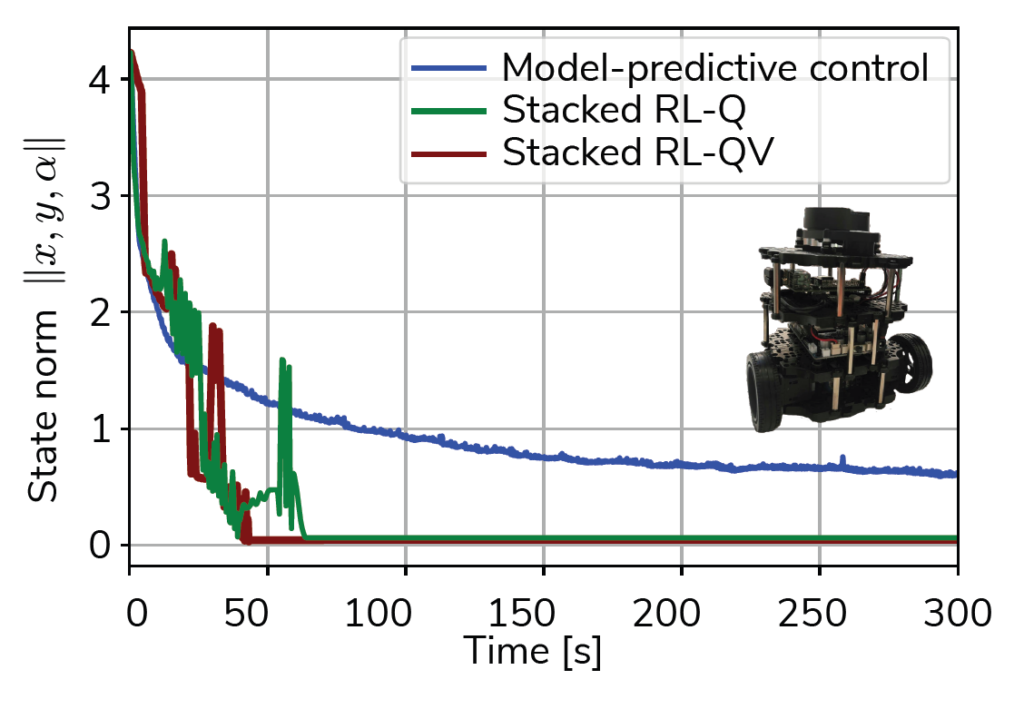
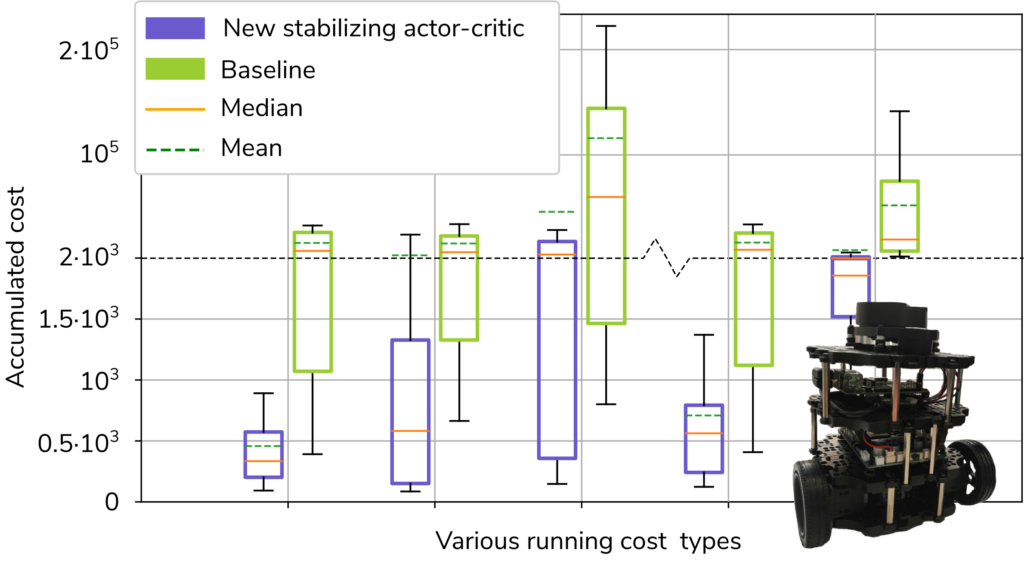
● Создан прототип умного сельскохозяйственного робота
● Робот способен определять состояние почв
● Создан прототип умного сельскохозяйственного робота
● Робот способен определять состояние почв
● Создан прототип умного сельскохозяйственного робота
● Робот способен определять состояние почв
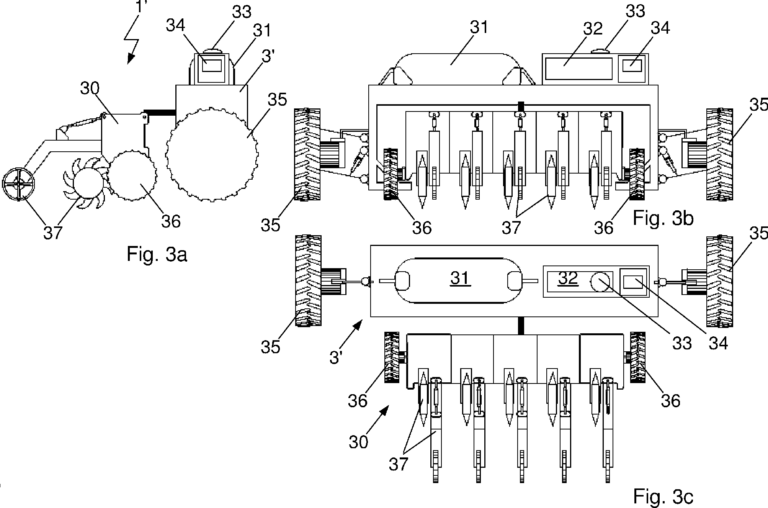
● Оптимизация энергоэффективности путём интеллектуального управления тягой


● Распределение азотных удобрений на основе данных о биомассе
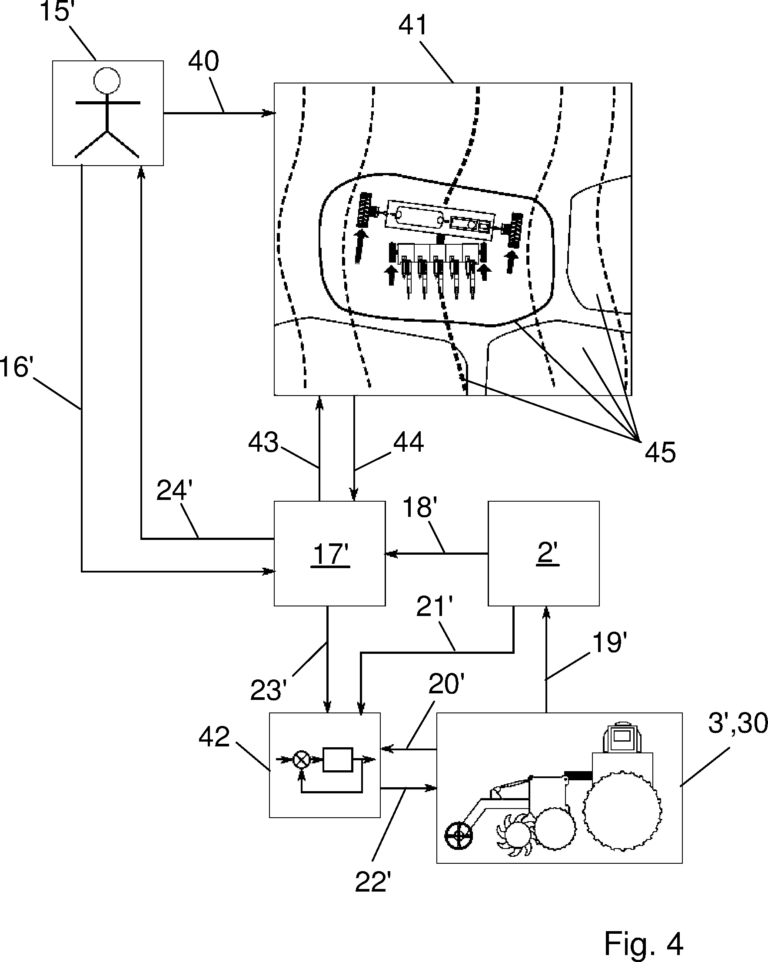
● Преобразование планов фермерских хозяйств в автоматизированные, предиктивные решения
● Распределение азотных удобрений на основе данных о биомассе
● Преобразование планов фермерских хозяйств в автоматизированные, предиктивные решения
● Распределение азотных удобрений на основе данных о биомассе
● Преобразование планов фермерских хозяйств в автоматизированные, предиктивные решения
● Разработан оптимальный регулятор для распределения азотных удобрений

● Прототипирован автоматический регулятор рабочих настроек комбайна для снижения потерь урожая
● Прототипирован автоматический регулятор рабочих настроек комбайна для снижения потерь урожая
● Прототипирован автоматический регулятор рабочих настроек комбайна для снижения потерь урожая
● Проведены полевые испытания, подтверждено улучшение по сравнению с человеком-оператором

● Прототипирован адаптивный регулятор для управления сочленением модулей автобуса
● Прототипирован адаптивный регулятор для управления сочленением модулей автобуса
● Прототипирован адаптивный регулятор для управления сочленением модулей автобуса
● Полный цикл разработки от аппаратной части до полевых испытаний
● Основной исполнитель: институт Fraunhofer IVI, Дрезден