● Developed a neural-network based solution for lane departure warning and virtual corridor system
● Developed a neural-network based solution for lane departure warning and virtual corridor system
● Developed a neural-network based solution for lane departure warning and virtual corridor system
● Implemented and tested the solution on the vehicle’s end ECU

● Prototyped a mobile robot for greenhouse monitoring
● Prototyped a mobile robot for greenhouse monitoring
● Prototyped a mobile robot for greenhouse monitoring
● Developed computer vision systems for yield estimation and crop disease detection with over 90 % accuracy

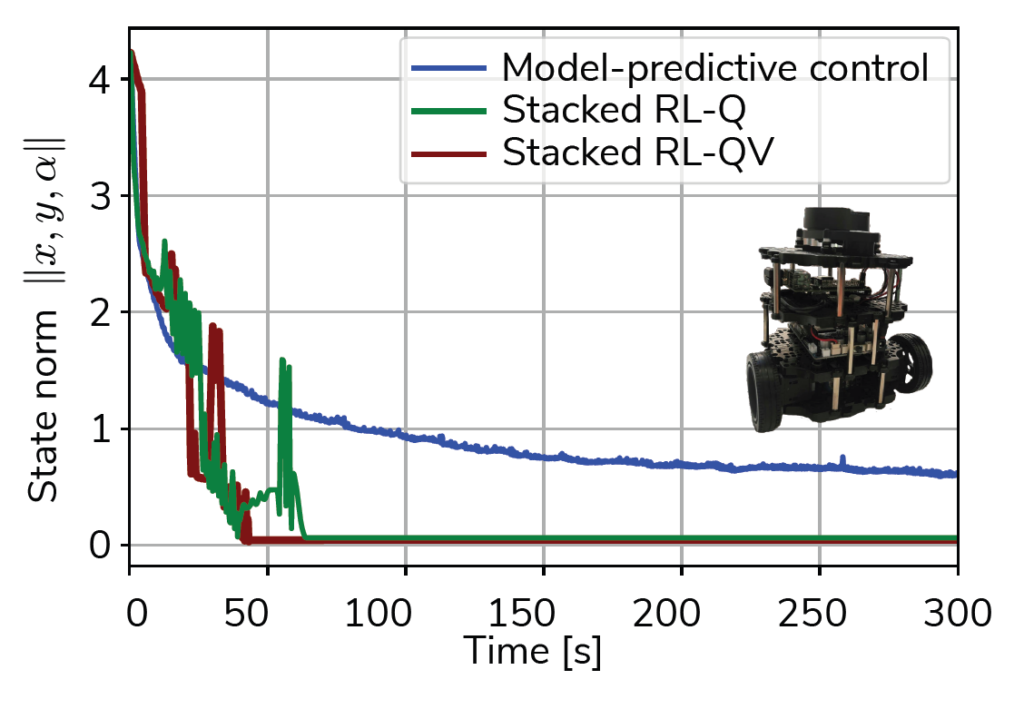
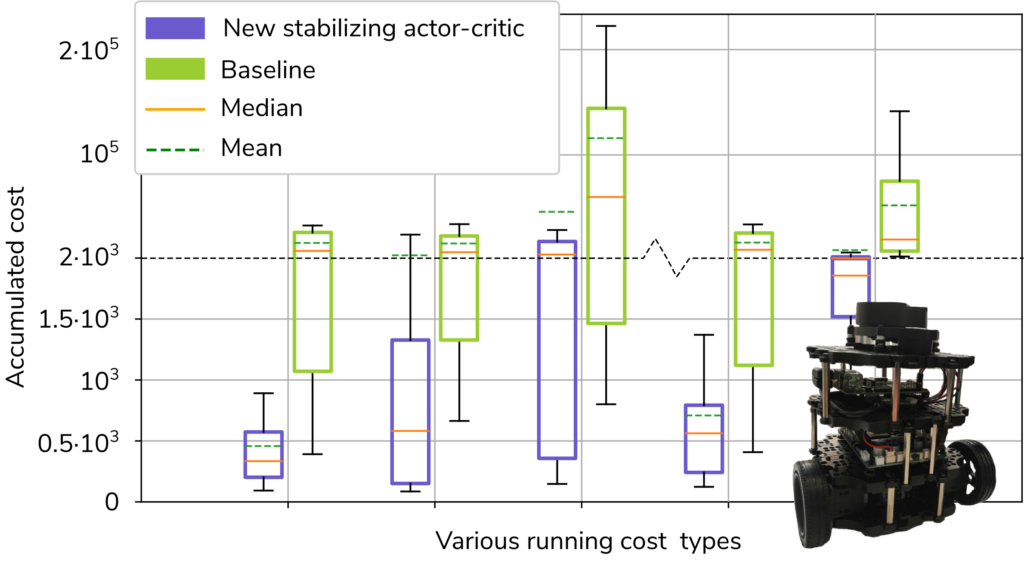
● Prototyped a smart mobile agricultural robot
● Robot can assess ground conditions via identification algorithms
● Prototyped a smart mobile agricultural robot
● Robot can assess ground conditions via identification algorithms
● Prototyped a smart mobile agricultural robot
● Robot can assess ground conditions via identification algorithms
● Energy efficiency optimization via intelligent propulsion control


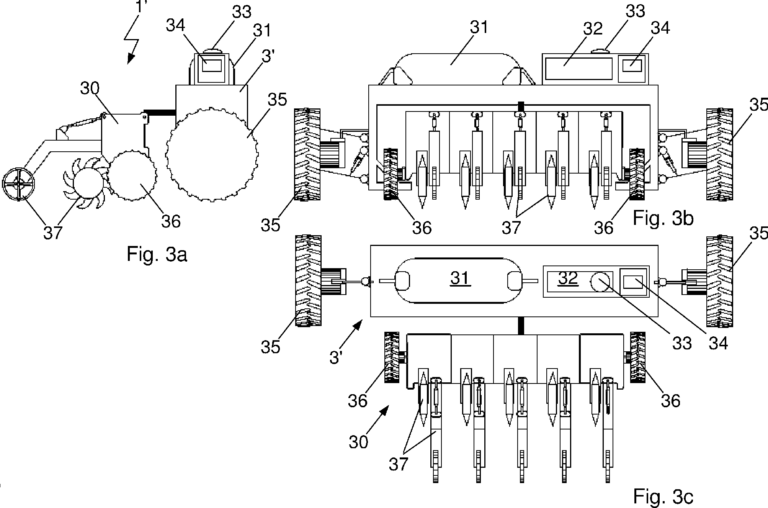
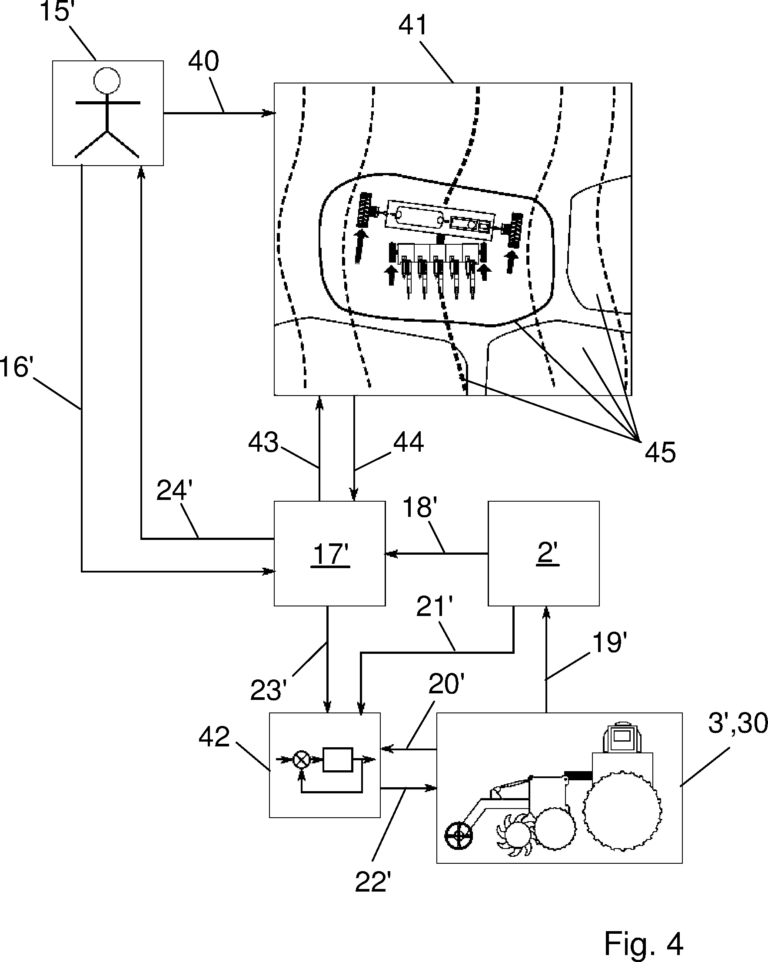
● Fertilization based on actual biomass distribution
● Translated farmer’s plans into an automated, predictive solution
● Fertilization based on actual biomass distribution
● Translated farmer’s plans into an automated, predictive solution
● Fertilization based on actual biomass distribution
● Translated farmer’s plans into an automated, predictive solution
● Developed an optimal controller for even fertilization

● Prototyped optimal harvester setting controllers for yield maximization and loss reduction
● Prototyped optimal harvester setting controllers for yield maximization and loss reduction
● Prototyped optimal harvester setting controllers for yield maximization and loss reduction
● Field tests showed improvement compared to an operator

● Prototyped an adaptive joint control system for a multi-modular bus
● Prototyped an adaptive joint control system for a multi-modular bus
● Prototyped an adaptive joint control system for a multi-modular bus
● Full cycle development: from concept to hardware implementation and testing
● Project hosted by Fraunhofer IVI, Dresden